3D基本变换
平移矩阵
通常处理三维中对模型进行平移的行为
$T(t_x,t_y,t_z) = \begin{pmatrix} 1 &0 &0 &t_x \\ 0 &1 &0 &t_y \\ 0 &0 &0 &t_z \\ 0 &0 &0 &1 \end{pmatrix} $
$t_x,t_y,t_z$通常表示对应轴上平移的距离
缩放矩阵
通常处理三维中对模型进行缩放的行为
$S(s_x,s_y,s_z) = \begin{pmatrix} s_x &0 &0 &0 \\0 &s_y &0 &0 \\ 0 &0 &s_z &0 \\ 0 &0 &0 &1 \end{pmatrix} $
$s_x,s_y,s_z$通常表示对应xyz轴的缩放比例
旋转矩阵
这个矩阵通常处理三维中对模型绕坐标轴进行旋转的行为
绕x轴旋转的矩阵为 $\begin{pmatrix} 1 &0 &0 &0 \\ 0 &cos(r) &-sin(r) &0 \\ 0 &sin(r) &cos(r) &0 \\ 0 &0 &0 &1 \end{pmatrix} $
绕y轴旋转的矩阵为 $\begin{pmatrix} cos(r) &0 &sin(r) &0 \\ 0 &1 &0 &0 \\ -sin(r) &0 &cos(r) &0 \\ 0 &0 &0 &1 \end{pmatrix} $
绕z轴旋转的矩阵为 $\begin{pmatrix} cos(r) &-sin(r) &0 &0 \\ sin(r) &cos(r) &0 &0 \\ 0 &0 &1 &0 \\ 0 &0 &0 &1 \end{pmatrix} $
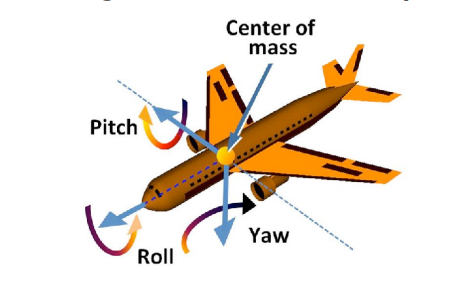
对于给定三个旋转角度的旋转,通常使用欧拉角
$R_{xyz}(\alpha,\beta,\gamma)=R_x(\alpha)R_y(\beta)R_z(\gamma)$
此时的三个旋转方向将被称为roll,pich,yaw
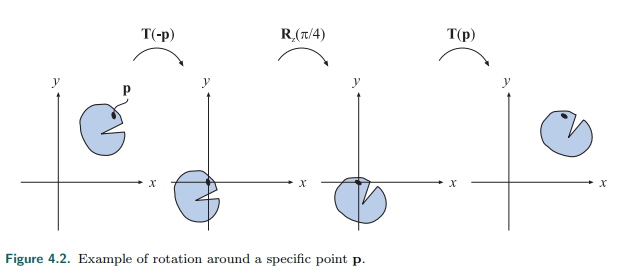
对于围绕某一特定点进行旋转的行为,则将该点平移至原点处后视为绕特定轴旋转
视角变换矩阵
这个矩阵通常用来定义相机对应的视角朝向,利用这个矩阵来将相机位置移动到原点,便于后续的模型进行平移旋转等变换
|
|
在上述代码中,eye_pos(x,y,z,1)往往为相机的位置
正交/投影矩阵
正交矩阵
正交矩阵将使摄像头置于坐标系原点,看向-Z轴方向,可以在Y轴上平行移动。 最终结果将表现为在XY轴平面上的2D图像,让模型坐标归一化到[-1,1]之间
总体流程
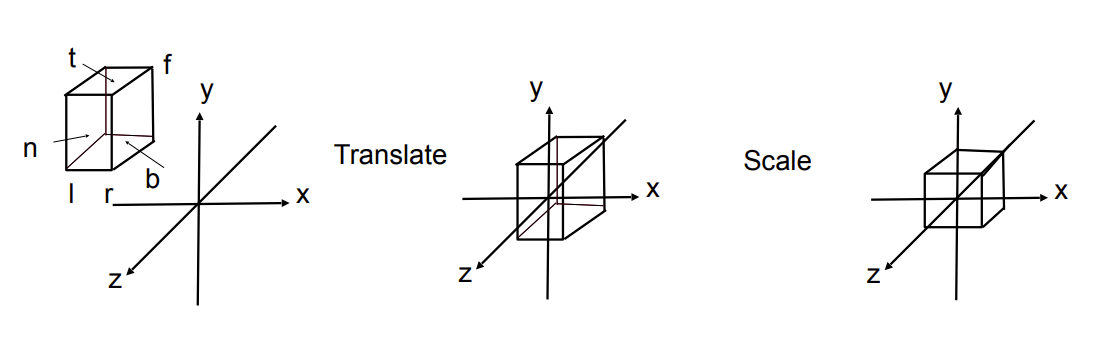
为了将一个$[l,r]\times[b,t]\times[f,n]$的长方体转换为符合canonical(正则、规范、标准)的正方体,我们需要进行两步操作
第一步
平移这个长方体到坐标系的原点
对应矩阵$M_{translate}=\begin{bmatrix} \frac{2}{r-l} &0 &0 &0 \\ 0 &\frac{2}{t-b} &0 &0 \\ 0 &0 &0 &\frac{2}{n-f} \\ 0 &0 &0 &1 \end{bmatrix}$
第二步
缩放这个长方体到符合正则、规范、标准的正方体
对应矩阵$M_{scale}=\begin{bmatrix} 1 &0 &0 &-\frac{r+l}{2} \\ 0 &1 &0 &-\frac{t+b}{2} \\ 0 &0 &1 &-\frac{n+f}{2} \\ 0 &0 &0 &1 \end{bmatrix}$
由第一二步可得出
正交矩阵为$M_{ortho}=\begin{bmatrix} \frac{2}{r-l} &0 &0 &0 \\ 0 &\frac{2}{t-b} &0 &0 \\ 0 &0 &0 &\frac{2}{n-f} \\ 0 &0 &0 &1 \end{bmatrix}\times\begin{bmatrix} 1 &0 &0 &-\frac{r+l}{2} \\ 0 &1 &0 &-\frac{t+b}{2} \\ 0 &0 &1 &-\frac{n+f}{2} \\ 0 &0 &0 &1 \end{bmatrix}$
图示
投影矩阵
投影矩阵将使模型满足自然界透视效果,如物体近大远小、所有的平行线变得不再平行,总会交于一点
推导过程
将远平面与近平面连线形成的梯形“挤压”到成为一个正方体
24R8DF%5BAB98E9%5D@1.png)
挤压的过程对梯形做横切面可知,计算挤压后的坐标点值实质上为计算相似三角形
如下图,可知挤压后的坐标与之前的坐标存在的数学关系为
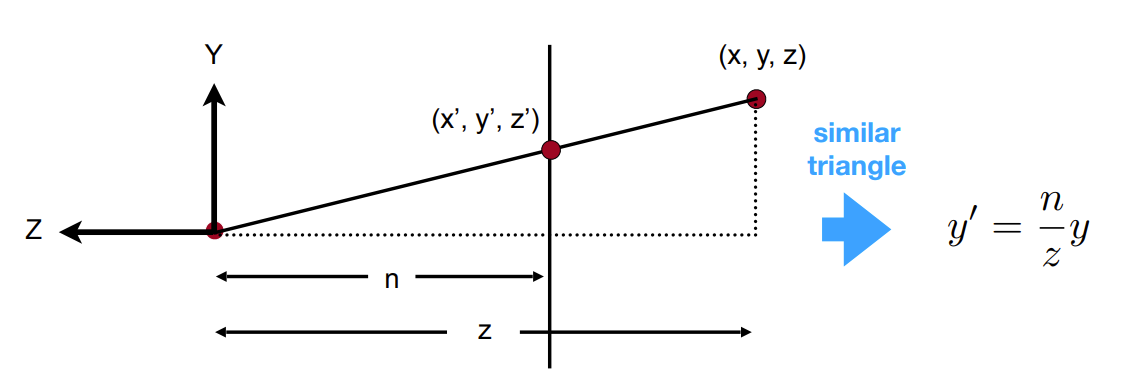
$$y^{'}=\frac{n}{z}y$$ $$x^{'}=\frac{n}{z}x$$
由此可知经过“挤压”后的坐标为 $$M_{persp->ortho}\times\begin{pmatrix} x \\ y \\ z \\ 1 \end{pmatrix}=\begin{pmatrix} nx \\ ny \\ {未知} \\ z \end{pmatrix}$$
所以 $$M_{persp->ortho}=\begin{pmatrix} n &0 &0 &0 \\ 0 &n &0 &0 \\ ? &? &? &? \\ 0 &0 &1 &0 \end{pmatrix}$$
又由远平面在被“挤压”后相当于近平面做正交投影得到的远平面,可知
- 任何在近平面上的点的坐标在“挤压”的过程中不发生改变
- 任何在远平面的点的坐标中的Z值不发生改变,即$$\begin{pmatrix} 0 \\ 0 \\ f \\ 1 \end{pmatrix}\rArr\begin{pmatrix} 0 \\ 0 \\ f \\ 1 \end{pmatrix}==\begin{pmatrix} 0 \\ 0 \\ f^2 \\ f \end{pmatrix}$$
在将上述坐标公式中Z的值以n替换之后可得 $$\begin{pmatrix} x \\ y \\ n \\ 1 \end{pmatrix}\rArr\begin{pmatrix} x \\ y \\ n \\ 1 \end{pmatrix}==\begin{pmatrix} nx \\ ny \\ n^2 \\ n \end{pmatrix}$$ 据此,可推测第三行未知坐标值符合以下关系 $$\begin{pmatrix} 0 &0 &A &B \end{pmatrix}\begin{pmatrix} x \\ y \\ n \\ 1 \end{pmatrix}=n^2$$ 因此 $$An+B=n^2$$ 联立性质2推导的 $$Af+B=f^2$$ 可得出 $$A=n+f$$ $$B=-nf$$
所以 $$M_{persp}=M_{ortho}M_{persp->ortho}=$$ $$\begin{pmatrix} \frac{2}{r-l} &0 &0 &0 \\ 0 &\frac{2}{t-b} &0 &0 \\ 0 &0 &0 &\frac{2}{n-f} \\ 0 &0 &0 &1 \end{pmatrix}$$ $$\times$$ $$\begin{pmatrix} 1 &0 &0 &-\frac{r+l}{2} \\ 0 &1 &0 &-\frac{t+b}{2} \\ 0 &0 &1 &-\frac{n+f}{2} \\ 0 &0 &0 &1 \end{pmatrix}$$ $$\times$$ $$\begin{pmatrix} n &0 &0 &0 \\ 0 &n &0 &0 \\ 0 &0 &n+f &-nf \\ 0 &0 &1 &0 \end{pmatrix}$$
涉及FovY的投影矩阵
FovY表示视域,即摄像机在固定时能看到的最大角度或最低角度的范围
Aspect ratio 表示纵横比,投影平面的长宽比
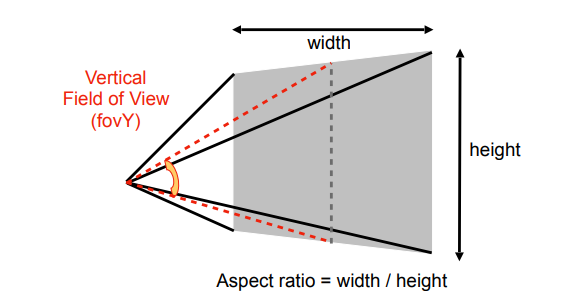
对应的相似三角形关系不变,参数改变
 可得如下关系
$$\tan{\frac{fovY}{2}}=\frac{t}{|n|}$$
$$aspect=\frac{r}{t}$$
因此
$$t=near\times tan(\frac{fovY}{2})$$
可得如下关系
$$\tan{\frac{fovY}{2}}=\frac{t}{|n|}$$
$$aspect=\frac{r}{t}$$
因此
$$t=near\times tan(\frac{fovY}{2})$$
$$r=aspect\times near\times tan(\frac{fovY}{2})$$ $$l=-aspect\times near \times tan(fovY/2)$$ 带入上述由l,b,n,f构成的矩阵可得 $$M_{persp->ortho}$$ $$=$$ $$\begin{pmatrix} \frac{2}{r-l} &0 &0 &0 \\ 0 &\frac{2}{t-b} &0 &0 \\ 0 &0 &\frac{2}{n-f} &0 \\ 0 &0 &0 &1 \end{pmatrix}$$ $$\times$$ $$\begin{pmatrix} 1 &0 &0 &-\frac{r+l}{2} \\ 0 &1 &0 &-\frac{t+b}{2} \\ 0 &0 &1 &-\frac{n+f}{2} \\ 0 &0 &0 &1 \end{pmatrix}$$ $$=$$
$$\begin{pmatrix} \frac{\frac{\cot{FovY}}{2}}{apsect*near} &0 &0 &0 \\ 0 & \frac{\frac{\cot{FovY}}{2}}{near} & 0 & 0 \\ 0 & 0 & \frac{2}{near-far} & 0 \\ 0 & 0 & 0 & 1 \end{pmatrix}$$
$$\times$$
$$\begin{pmatrix} 1 &0 &0 &0 \\ 0 &1 &0 &0 \\ 0 &0 &1 &-\frac{near+far}{2} \\ 0 &0 &0 &1 \end{pmatrix}$$
$$=$$
$$\begin{pmatrix} \frac{\frac{\cot{FovY}}{2}}{apsect * near} &0 &0 &0 \\ 0 &\frac{\frac{\cot{FovY}}{2}}{near} &0 &0 \\ 0 &0 &\frac{2}{near-far} &-\frac{near+far}{near-far} \\ 0 &0 &0 &1 \end{pmatrix}$$
视口变换
经过MVP矩阵计算后得到的一个正则的正方体需要将X轴和Y轴上的坐标映射到屏幕坐标[0,width]$\times$[0,height]
变换时需要先将[-1,1]缩放到屏幕大小[width,height],再进行平移使得原点坐标与屏幕原点对齐
变换矩阵 $$M_{viewport}=\begin{bmatrix} \frac{width}{2} &0 &0 &\frac{width}{2} \\ 0 &\frac{height}{2} &0 &\frac{height}{2} \\ 0 &0 &1 &0 \\ 0 &0 &0 &1 \end{bmatrix}$$