矩阵与复合线性变换的关系
复合线性变换:完成一次变换后再次进行变换,如先旋转再剪切。与一次变换相同,也可通过追踪$\hat{i}$和$\hat{j}$来确定变换后的向量变换
新矩阵表示了一个单独的作用来完成复合线性变换
对于一个先旋转后剪切的线性变换,可以用以下方式来进行计算
选左乘旋转矩阵再左乘剪切矩阵,数值上表示对一个给定向量进行旋转然后剪切
$$ \begin{bmatrix} 1 & 1 \\ 0 & 1 \end{bmatrix} (\begin{bmatrix} 0 & -1 \\ 1 & 0 \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix}) = \begin{bmatrix} 1 & -1 \\ 1 & 0 \end{bmatrix} \begin{bmatrix} x \\ y \end{bmatrix} $$
由此可得,对于下列矩阵,需要从右向左读,即先应用右侧矩阵描述的变换再应用左侧矩阵描述的变换
$$ \begin{bmatrix} 1 & 1 \\ 0 & 1 \end{bmatrix} \begin{bmatrix} 0 & -1 \\ 1 & 0 \end{bmatrix} = \begin{bmatrix} 1 & -1 \\ 1 & 0 \end{bmatrix} $$
两个矩阵相乘有着几何意义,即两个线性变换相继作用
矩阵相乘计算流程
$$ \begin{bmatrix} a & b \\ c & d \end{bmatrix} \begin{bmatrix} e & f \\ g & h \end{bmatrix} = \begin{bmatrix} ? & ? \\ ? & ? \end{bmatrix} $$
首先,要得知$\hat{i}$的终点可由第二个矩阵的第一列得知,因此
$$ \begin{bmatrix} a & b \\ c & d \end{bmatrix} \begin{bmatrix} e \\ g \end{bmatrix} = e \begin{bmatrix} a \\ c \end{bmatrix} + g \begin{bmatrix} b \\ d \end{bmatrix} = \begin{bmatrix} ae + bg \\ ce + dg \end{bmatrix} $$
其次,$\hat{j}$终点在右侧矩阵第二列所表示的位置上
$$ \begin{bmatrix} a & b \\ c & d \end{bmatrix} \begin{bmatrix} f \\ h \end{bmatrix} = f \begin{bmatrix} a \\ c \end{bmatrix} + h \begin{bmatrix} b \\ d \end{bmatrix} = \begin{bmatrix} af + bh \\ cf + dh \end{bmatrix} $$
可得最终结果为
$$ \begin{bmatrix} a & b \\ c & d \end{bmatrix} \begin{bmatrix} e & f \\ g & h \end{bmatrix} = \begin{bmatrix} ae + bg & af + bh \\ ce + dg & cd + dh \end{bmatrix} $$
矩阵相乘顺序
$$ M_1M_2 \not ={M_2M_1} $$
矩阵相乘结果受顺序影响
可由相乘本质是进行多次线性变换得知,改变变换的顺序会导致不同的结果

对于结合律,本质上没有改变变换的顺序,因而不会导致结果不同
$$ A(BC) = (AB)C $$
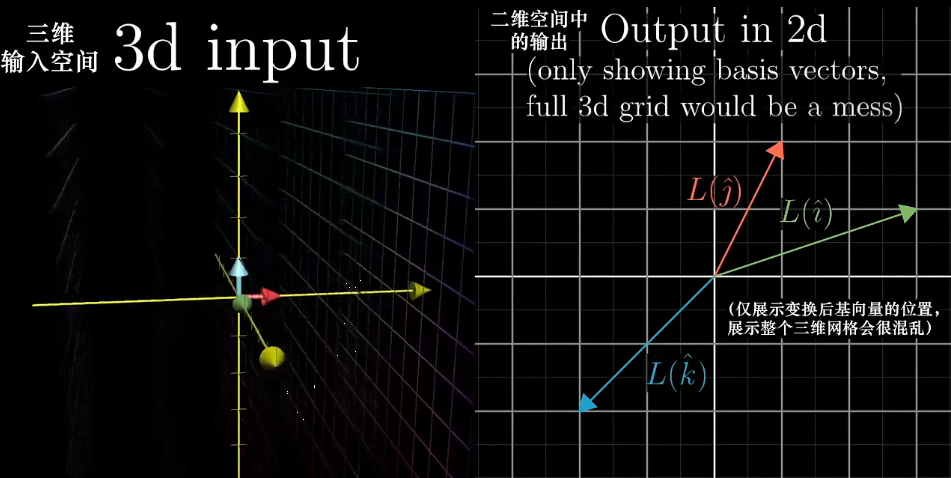
三维空间下的线性变换
三维空间下的线性变换可由二维拓展,都可由基向量表示所有的向量
三维下需要引入三个基向量,X轴的$\hat{i}$,Y轴的$\hat{j}$,Z轴的$\hat{k}$
需要得知变换后的向量位置只需要将坐标与矩阵的对应列相乘
$$ \begin{bmatrix} 0 & 1 & 2 \\ 3 & 4 & 5 \\ 6 & 7 & 8 \end{bmatrix} \begin{bmatrix} x \\ y \\ z \end{bmatrix} = x \begin{bmatrix} 0 \\ 3 \\ 6 \end{bmatrix}+ y \begin{bmatrix} 1 \\ 4 \\ 7 \end{bmatrix} + z \begin{bmatrix} 2 \\ 5 \\ 8 \end{bmatrix} = \begin{bmatrix} 0+y+2z \\ 3x+4y+5z \\ 6x+7y+8z \end{bmatrix} $$
对于两个矩阵相乘也是类似的,第二个矩阵的三个列分别对应三个基向量的位置
$$ \begin{bmatrix} 0 & -2 & 2 \\ 5 & 1 & 5 \\ 1 & 4 & -1 \end{bmatrix} \begin{bmatrix} 0 & 1 & 2 \\ 3 & 4 & 5 \\ 6 & 7 & 8 \end{bmatrix} $$
$\hat{i}$的终点可由第二个矩阵的第一列得知
$$ \begin{bmatrix} 0 & -2 & 2 \\ 5 & 1 & 5 \\ 1 & 4 & -1 \end{bmatrix} \begin{bmatrix} 0 \\ 3 \\ 6 \end{bmatrix} = 0 \begin{bmatrix} 0 \\ 5 \\ 1 \end{bmatrix} + 3 \begin{bmatrix} -2 \\ 1 \\ 4 \end{bmatrix} + 6 \begin{bmatrix} 2 \\ 5 \\ -1 \end{bmatrix} = \begin{bmatrix} 0-6+12 \\ 0+3+30 \\ 0+12-6 \end{bmatrix} $$
$\hat{j}$的终点可由第二个矩阵的第二列得知
$$ \begin{bmatrix} 0 & -2 & 2 \\ 5 & 1 & 5 \\ 1 & 4 & -1 \end{bmatrix} \begin{bmatrix} 1 \\ 4 \\ 7 \end{bmatrix} = 1 \begin{bmatrix} 0 \\ 5 \\ 1 \end{bmatrix} + 4 \begin{bmatrix} -2 \\ 1 \\ 4 \end{bmatrix} + 7 \begin{bmatrix} 2 \\ 5 \\ -1 \end{bmatrix} = \begin{bmatrix} 0-8+14 \\ 5+4+35 \\ 1+16-7 \end{bmatrix} $$
$\hat{k}$的终点可由第二个矩阵的第三列得知
$$ \begin{bmatrix} 0 & -2 & 2 \\ 5 & 1 & 5 \\ 1 & 4 & -1 \end{bmatrix} \begin{bmatrix} 2 \\ 5 \\ 8 \end{bmatrix} = 2 \begin{bmatrix} 0 \\ 5 \\ 1 \end{bmatrix} + 5 \begin{bmatrix} -2 \\ 1 \\ 4 \end{bmatrix} + 8 \begin{bmatrix} 2 \\ 5 \\ -1 \end{bmatrix} = \begin{bmatrix} 0-10+16 \\ 10+5+40 \\ 2+20-8 \end{bmatrix} $$
所以最终结果为
$$ \begin{bmatrix} 0 & -2 & 2 \\ 5 & 1 & 5 \\ 1 & 4 & -1 \end{bmatrix} \begin{bmatrix} 0 & 1 & 2 \\ 3 & 4 & 5 \\ 6 & 7 & 8 \end{bmatrix} = \begin{bmatrix} 0-6+12 & 0-8+14 & 0-10+16 \\ 0+3+30 & 5+4+35 & 10+5+40 \\ 0+12-6 & 1+16-7 & 2+20-8 \end{bmatrix} $$
非方阵
对于一个3$\times$2矩阵$\begin{bmatrix} 2 & 0 \\ -1 & 1 \\ -2 & 1 \end{bmatrix}$同样可以用线性变换来解释,只是输入向量和输出向量在不同维度上,因而没有关联
第一列认为是变换后的$\hat{i}$,第二列认为是变换后的$\hat{j}$
列空间是三维空间中一个过原点的二维平面,但由于列空间的维数与输入空间维数相等,依旧是满秩的,几何意义是将二维空间映射到三维空间上
同样地,对于一个2 $\times$ 3矩阵
几何上表示将三维空间映射到二维空间上
二维到一维空间的转换也存在,一维空间本质就是数轴,即将两个基向量压缩到一条直线上,如果直线上有一系列等距分布的点,在映射到数轴后依旧保持等距分布此处不再过多赘述